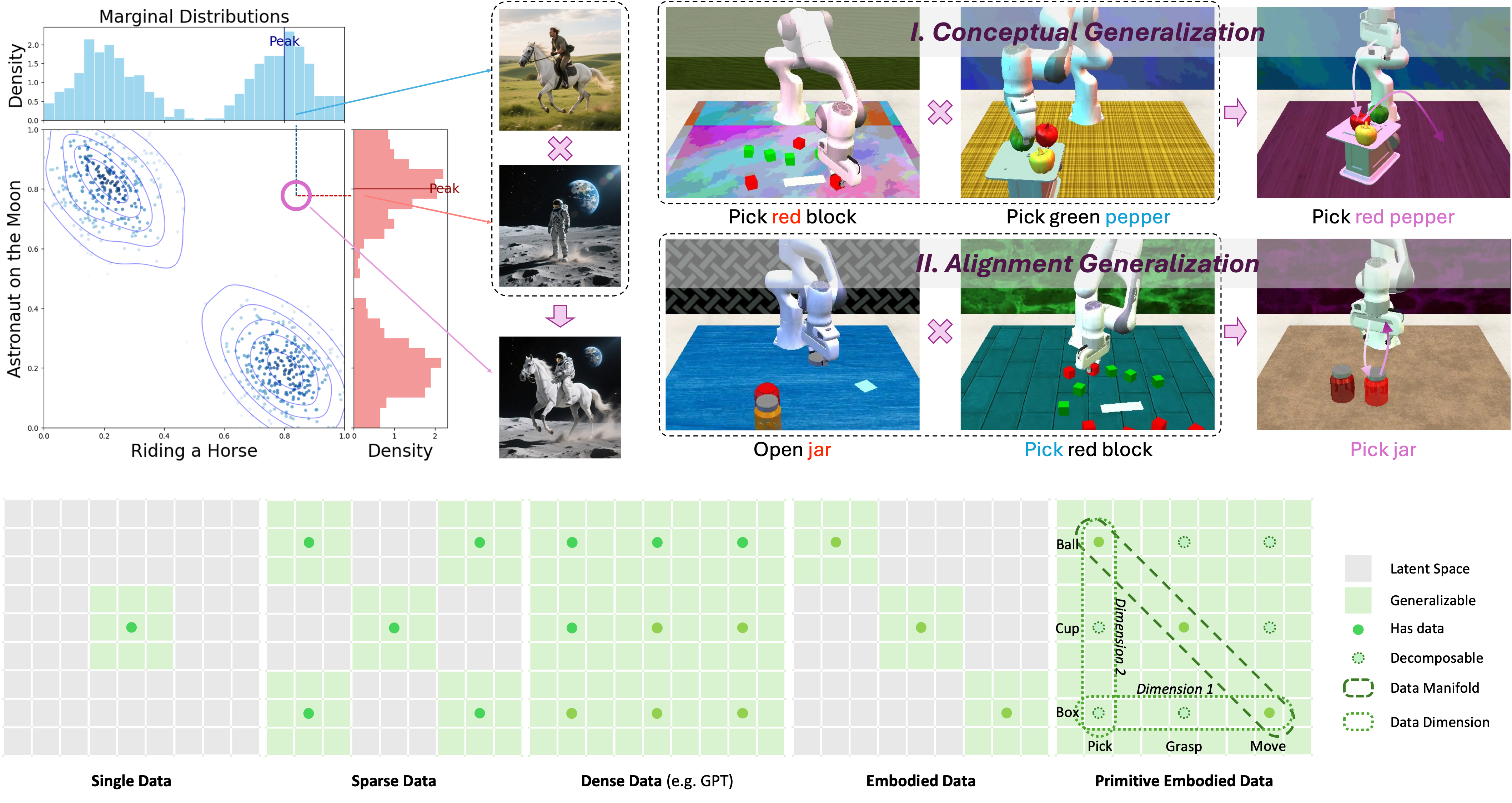
Learning Primitive Embodied World Models: Towards Scalable Robotic Learning
Qiao Sun, Liujia Yang, Wei Tang, Wei Huang, Kaixin Xu, Yongchao Chen, Mingyu Liu, Jiange Yang, Haoyi Zhu, Yating Wang, Tong He, Yilun Chen, Xili Dai, Nanyang Ye, Qinying Gu

Fudan University
Towards Building Embodied Intelligence that Can Understand & Interact with the Physical World.
TesserAct is Accepted at ICCV 2025!
Looking forward to the next trip to Hawaii 🏝️!!!
Excited to announce that the
Paper,
Code,
Model, and
Website
of
TesserAct: Learning 4D Embodied World Models
are publicly available!
Explore and enjoy our Model right now 🤩
Thrilled to be picked up as an on-site Volunteer 🎉 Cannot wait to meet Old & New friends at Abu Dhabi!!
One of my first-authored papers has been Accepted at COLING 2025! I am thrilled to go for an exciting journey in the United Arab Emirates 🇦🇪!!!
I am honored to be a reviewer for two papers. Trying my best to do a perfect work!
I am going to deliver a presentation on MiniConGTS at EMNLP 2024, Miami 🏝️. Thanks to all attendees for the engaging discussions!

Weihan Yin, Qinying Gu, Yaoyun Zhang, Lin Zhu, Qiao Sun, Liujia Yang, Xinbing Wang, and Nanyang Ye
Accepted at COLING 2025
Qiao Sun, Jiexin Xie, Nanyang Ye, Qinying Gu, Shijie Guo
Accepted at Main Conference of EMNLP 2024
Qiao Sun, Liujia Yang, Minghao Ma, Nanyang Ye, Qinying Gu

Qi Fan*, Qiao Sun*, Nanyang Ye, Qinying Gu

Nanyang Ye*, Qiao Sun*, Yifei Wang, Liujia Yang, Jundong Zhou, Lei Wang, Guang-Zhong Yang, Xinbing Wang, Chenghu Zhou, Wei Ren, Leilei Gu, Huaqiang Wu, Qinying Gu
* Denotes Equal Contributions
Email: qiaosun22@m.fudan.edu.cn
GitHub: github.com/qiaosun22
Location: 220 Handan Rd., Yangpu, Shanghai, China
WeChat: Please scan this QR Code .